H-VIS (Vision, navigation et actions intentionnelles des robots humanoïdes) est une action de recherche collaborative (ARC) de l'INRIA dédié à la perception des robots humanoïdes.
Les partenaires de cette ARC sont les EPI INRIA Lagadic, BIPOP, BUNRAKU, E-MOTION et le LAAS-CNRS (Toulouse)
Objectif
L'objectif de ce projet est l'étude des liens entre le processus de perception visuelle et la commande du mouvement d'humanoïdes exécutant des tâches variées en environnement ouvert et dynamique.
Plus précisément, nous souhaitons étudier la génération des mouvements de l'ensemble du corps d'un humanoïde à partir de ses capteurs de vision. Par humanoïdes, nous considérerons dans ce projet aussi bien des avatars virtuels que des robots humanoïdes. Les mouvements que nous souhaitons contrôler concernent les mouvements de la tête (et éventuellement des yeux), pour se focaliser et suivre un objet en déplacement, les mouvements des jambes et du torse pour assurer des phases d'approche par rapport à un objet (ces mouvements incluant évidement des mouvements de marche), et finalement les mouvements d'un ou de plusieurs bras pour assurer des tâches de saisie d'objet, l'ensemble de ces mouvements devant être gérés simultanément.
Documents
- Les slides de la présentation H-VIS aux journées ARC à Bordeaux
- Le poster présenté lors des journées ARC INRIA à Sophia Antipolis
- Proposition H-VIS

Emplois
- Post doc 2008-2009 à Rennes : Contrôle des humanoides par asservissement visuel
- Thèse 2008-2011 à Grenoble : Visual SLAM for humanoid robot using intrinsic scale
Publications
- A. Herdt, N. Perrin, P.B. Wieber, Walking without thinking of it, soumis à ICRA 2010.
- A. Herdt, O. Diedam, P.B. Wieber, D. Dimitrov, K. Mombaurn, M. Diehl, Online Walking Motion Generation with Automatic Foot Step Placement, Advanced Robotics 2009.
| Nouveautés | |
|
30 septembre 2009 |
Journées ARC INRIA à Bordeaux Les slides |
|
23-27 février 2009 |
Séjour de Nicolas Mansard (LAAS) à Rennes exposé sur : "Cinématique inverse generalise: développement et perspectives" |
|
18-19 novembre 2008 |
Meeting à Toulouse |
|
1-2 octobre 2008 |
Journées ARC INRIA à Sophia Antipolis Le poster |
|
17 avril 2008 |
Meeting à Toulouse |
|
Mars 2008 |
Proposition de thèse (e-motion), de post-doc (Lagadic, bunraku) |
|
février 2008 |
Acception de la proposition d'ARC |
| Quelques videos | |
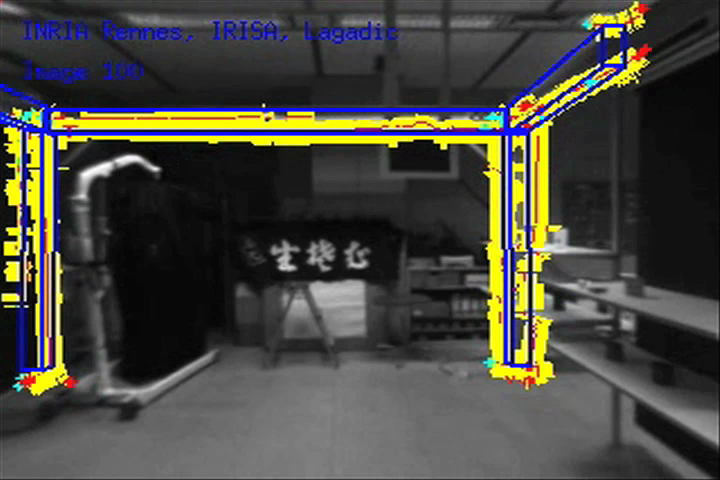 |
Suivi d'une structure complexe par un robot humanoïde en mouvement |
 |
Perception et mouvement d'un groupe d'humanoïde en mouvement |
 |
Asservissement visuel d'un humanoïdes (avec locomotion) |
 |
Asservissement visuel d'un humanoïdes (sans locomotion) |
 |
Préhension d'un objet mobile par un robot humanoïdes par asservissement visuel |
 |
Asservissement visuel d'un humanoïdes |